What are the advantages and disadvantages of FIR and IIR filters?
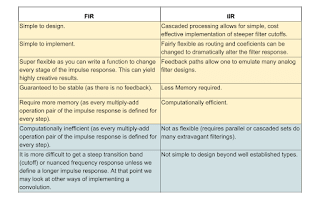
FIR (Finite Impulse Response) and IIR (Infinite Impulse Response) filters are the two main types of digital filters used in signal processing. Each has its advantages and disadvantages depending on the application. FIR vs. IIR Filter Comparison Feature FIR Filters IIR Filters Impulse Response Finite (settles to zero in finite time) Infinite (theoretically never ends) Stability Always stable (if implemented correctly) May become unstable due to feedback Phase Response Can be designed to have linear phase Generally non-linear phase Implementation Complexity Requires more coefficients for sharp filters Efficient with fewer coefficients Design Flexibility Easier to design with exact specifications More difficult to design with precise specs Computational Load Higher (more multiplications/additions) Lower (more efficient for real-time use) Sensitivity to Quantization Less sensitive More sensitive (feedback path affected) Applications Audio, communications, systems needing ...
.jpg)





